| Utolsó módosítás: 2016-11-04 19:00:56 |
|
Most hogy az Európai Űrügynökség (ESA) majdnem letett egy szondát a Mars felszínére, felvetődhet a kérdés: miért küld az emberiség robotokat más bolygókra, holdakra? A válasz egyszerű: vagy azért, hogy embert ne kelljen, vagy éppen azért, hogy előkészítse az embernek a terepet. Egy hasznos kis rover képes sok-sok kilométert megtenni a legmostohább körülmények között, miközben begyűjti az eljövendő küldetések számára fontos tudományos adatokat, vagy akár kitermeli a kolonizáláshoz szükséges nyersanyagokat. A Schiaparelli balsikerű landolása apropóján, és mivel pár év múlva az ESA maga is önjáró robotot tervez a Marsra küldeni, következzen egy rövid képes körkép az utóbbi évek roverfejlesztéseiről. Az Etna élettelen vulkanikus lejtőjén tesztelték idén a ROBEX-szövetség (Robotic Exploration of Extreme Environments) holdjáróját a Német Űrkutatási Központ (DLR) tudósai, mérnökei. A tervek szerint 2017-ben ér véget a program, amelynek keretein belül 16 német kutatóintézet fogott össze hogy autonóm mélytengeri és bolygókutató robotokat fejlesszenek ki.
Fotó: DLR
Az Oregoni Egyetem Mars-kutató robotja a NASA mintavevő robotoknak rendezett 2014-es versenyén, ahol teljesen önállóan kellett a rovereknek a kitűzött feladatokat végrehajtani különféle terepeken.
Fotó: Joel Kowsky / NASA
Az Airbus is részt vesz a roverfejlesztő kutatásokban, az alábbi képen a cég marsi körülményeket szimuláló terme látható. A Stevenage-ben található komplexum segít többek között a roverek által használt navigációs rendszerek fejlesztésében.
Fotó: Max Alexander / Airbus Defence and Space 2014
Az Európai Űrügynökség (ESA, aminek ugyebár hazánk is tagja) valamint az Orosz Szövetségi Űrügynökség (RKA, avagy Roszkoszmosz) közös projektje az ExoMars 2018 rover, ami — mint azt a neve mutatja — 2018-ban gurul majd le a leszállóegység fedélzetéről a marsi homokba. Az alábbi képen épp ezt a kritikus mozzanatot gyakorolja a kis távirányítású európai robot.
Fotó: ESA
A német SEAR (Small Exploration Assistant Rover) rover a Berlini Műszaki Egyetem űrkutatási fakultásának alkotása, a képen épp a DLR 2013-as robotkupáján küzd meg egy feladattal.
Fotó: DLR
Az ESA Eurobot Ground Prototype (EGP) projektje a Hold vagy a Mars kolonizálása során felmerülő feladatokra koncentrál. Az EGP célja az idegen égitestekre lépő, ott megtelepedni próbáló embereknek segítséget nyújtó robotok kifejlesztése.
Fotó: ESA
Akár űrhajósok is vezethetik a Eurobot Ground Prototype rovert.
Fotó: P. Santek / ESA/ÖWF
Bridget, a marsjáró az ESA ExoMars 2018 roverének tesztverziója, itt épp chilei Atacama sivatagban hajt végre referenciafeladatokat.
Fotó: Gerhard Huedepohl / ESO
A német Locomotec cég rovere kicsit Popeye-re hasonlít a rászerelt masszív ipari robotkarral. A kissé esetlennek tűnő rover a DLR 2013-as robotversenyén mutatkozott be.
Fotó: DLR
Ez itt az Artemis Jr. névre keresztelt napelemes holdjáró, amit a Kanadai űrügynökség fejlesztett ki a NASA számára, hogy nyersanyaggyűjtési feladatokat tesztelhessenek vele.
Fotó: NASA
Az ESA Interact Centaur Rover nevű 2015-ös robotját azért alkották az Európai Űrügynökség telerobotika laborjának kutató mérnökei, hogy a Nemzetközi Űrállomáson tartózkodó ESA-űrhajós távirányítással működtesse, tesztelve miképp lehet kutató robotokat bolygó körüli pályáról irányítani.
Fotó: S. Verzier / ESA
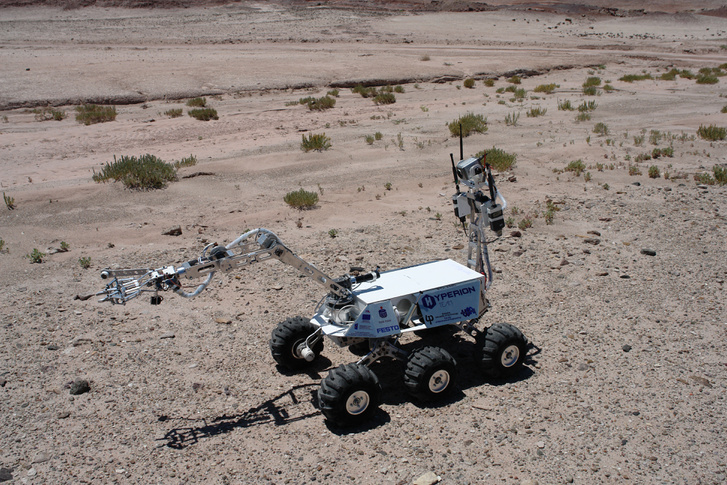
A lengyelországi Bialystok Műszaki Egyetem Hyperion II rovere a 2014-es University Rover Challenge győztese volt az Egyesült Államokban.
Fotó: Hyperion team / ESA
Az Indiai Űrkutatási Szervezet (ISRO) a Chandrayaan-2 nevű holdjáróján dolgozik, ami egy Hold körül keringő szondával és egy leszállóegységgel kiegészülve lesz majd hivatott a Hold geológiai kutatására. A projektben kezdetben részt vett a Roszkoszmosz is, de pár évvel ezelőtt az oroszok kiszálltak, így a 2018-ra tervezett robotfelderítő teljes egészében indiai küldetés lesz.
Fotó: Pallava Bagla / Getty Images Hungary
2008-ban mutatta be NASA a Mobile Lunar Transporter prototípusát. Az űrhajósok által is vezethető nyitott jármű hat pár kereke közül mindegyik függetlenül mozgatható, így bármilyen irányban haladhat.
Fotó: NASA
Ugyancsak 2008-as újonc az Autonomous Drilling Rover (Önjáró Fúrórobot) névre hallgató eszköz. Az áramvonalas rover feladata a felszín alatti értékes ásványkincsek felkutatása a Hold sarki vidékein, ezért úgy tervezték, hogy különlegesen hideg és sötét körülmények között is tudjon dolgozni.
Fotó: NASA
A szintén 2008-ban bemutatott K10 roverek célja a hosszú ideig tartó, monoton feladatok átvállalása az űrhajósoktól. A földi tesztek során a roverek felmérték a szimulált holdi leszállási körzetet, valamint 3D-s topografikus és panoráma terepmodelleket készítettek.
Fotó: NASA
A NASA konstruktőrei egy teljesen zárt, több utas szállítására is alkalmas holdjárót is készítettek, ami alkalmas lehet nagyobb távok viszonylag kényelmes megtételére is. A 12-kerekű SEV ( Space Exploration Vehicle) akkora, mint egy közepes teherautó, és úgy tervezték, hogy akár tíz évet is kibírjon a mostoha földönkívüli körülmények között.
Még nem érkezett hozzászólás ehhez a témához.
|







